誘導電動機

Contents
誘導電動機(induction motor)
スポンサーリンク
1.誘導電動機とは
誘導電動機は、固定子が作る回転磁界によって、良導体の回転子に誘導電流が発生して滑りに対応した回転トルクが発生することにより回転します。交流電動機の代表的なものです。
入力交流電源の種類により、単相誘導電動機と三相誘導電動機とがあります。単相誘導電動機は、始動コイルなどの付加装置により回転磁界をつくる必要がありますが、三相誘導電動機の場合は、特別な工夫をする必要無しに回転磁界が発生するので構造が簡単です。定格出力が小さい場合を除いて三相誘導電動機が一般的です。
同じ交流電動機である同期電動機と比較して脱調することがありません。そのためトルク変動の大きい負荷に適しています。ただ、原理上回転トルクは滑りにより得られるので、電動機の定格出力や負荷により正確な回転数に制御できないことが課題でしたが、パワーエレクトロニクスの発達により、インバータ回路で大定格出力の電動機でも、回転数を自由に制御可能になり、この欠点は解消されるようになりました。
2.誘導電動機の原理
磁界中に置かれた良導体に電流を通じると力が発生します。
\( F = BIl \) (式1)
ここで、
\( F \):力 (N/m)
\( B \):磁束密度 (T(テスラ)または、Wb/m2)
\( I \):電流 (A)
\( l \):導体長 (m)
これが、電動機の原理になります(図1)。

図1 電動機の原理
さらに、誘導電動機の回転原理はアラゴの円板で説明できます。図2はアラゴの円板の原理を示します。銅またはアルミニウムの回転円板を軸で支承して、円板の周辺に馬蹄形磁石を円板を挟むように設けます。磁石を円周方向に急激に動かすと、円板中に渦電流が生じて磁束と渦電流との作用により、磁石の運動方向に磁石の移動速度より遅い速度で同じ方向に回転します。
つまり、移動する磁界中に置かれた円板(良導体)に電圧が誘導されて電流が流れます。磁束と電流との相互作用により回転トルクが生じて、軸受に支えられた円板が回転します。

図2 アラゴの円板
誘導電動機は、この回転磁界により良導体である回転子に誘導電流が発生して、滑りに対応した回転トルクが発生することにより回転します。
3.同期速度
三相誘導電動機の固定子に、3組のコイルを120°の間隔で配置して、これに三相交流を流すと回転磁界が発生します。磁極数Pの誘導電動機に周波数\( f \) (Hz)の三相交流を供給すると、電流の位相と同じように回転磁界も同位相で回転します。
すなわち、同期速度とは回転磁界の回転する速度のことです。
\( N_{ s } (同期速度) = \displaystyle \frac { 120 \times f (周波数) }{ P(極数) } \) (min-1) (式2)
4.すべり
誘導電動機では、回転子の回転速度(回転数)\( N \) (min-1)は、回転磁界の回転速度(同期速度)より少し遅れて回転します。この遅れをすべり回転数\( (N_{ s } – N) \) と同期速度\( N_{ s } \)との比はすべりと呼びます。
誘導電動機では、\( S=1(N=0)\)のときは静止状態を、\( S=0(N=Ns)\)のときは同期速度で回転する無負荷状態を示します。ただ、実際は固定損などがあり\( S=0 \)にはなりません。全負荷時のすべりはおおよそ3~8%で、小定格出力機ほど大きな値を取ります。
\( S (すべり) = \displaystyle \frac{ (N_{ s }(同期速度) – N (回転数)) }{ N_{ s }(同期速度) }\) \( \times 100 (%) \) (式3)
\( N (回転数) = N_{ s } ( 1-S )
= ( 120 \times f )( 1-S ) / P(極数) \) (min-1) (式4)
5.始動電流
停止状態で電源を投入すると、全負荷電流の5~7倍程度の電流が流れます。この電流を始動電流といいます。大きい始動電流は電動機に障害を起こす場合があるので、始動電流を制限するようにする必要があります。小定格出力機を除いて、始動時の電圧を下げる工夫をして始動電流を低減させます。
例えば、Y-Δ(スターデルタ)始動や、リアクトル始動、一時抵抗始動などの始動方法があります。
6.定格トルク(全負荷トルク)
三相誘導電動機に発生するトルクは、一次側の三相巻線に三相交流を供給した結果生じた回転磁界と、回転磁界により誘導された二次電流との間に生じる電磁力や電流、位相差によりトルクの大きさが決まります。
定格トルクとは、定格電圧、定格周波数で定格出力を出した際のトルクをいいます。全負荷トルクともいいます。(図3)
\( T(定格トルク) = \displaystyle \frac{ (60 \times P(定格出力;kW) \times 1000 ) }{ 2 \pi \times N(定格回転速度;min^{ -1 }) } \) (N・m) (式5)
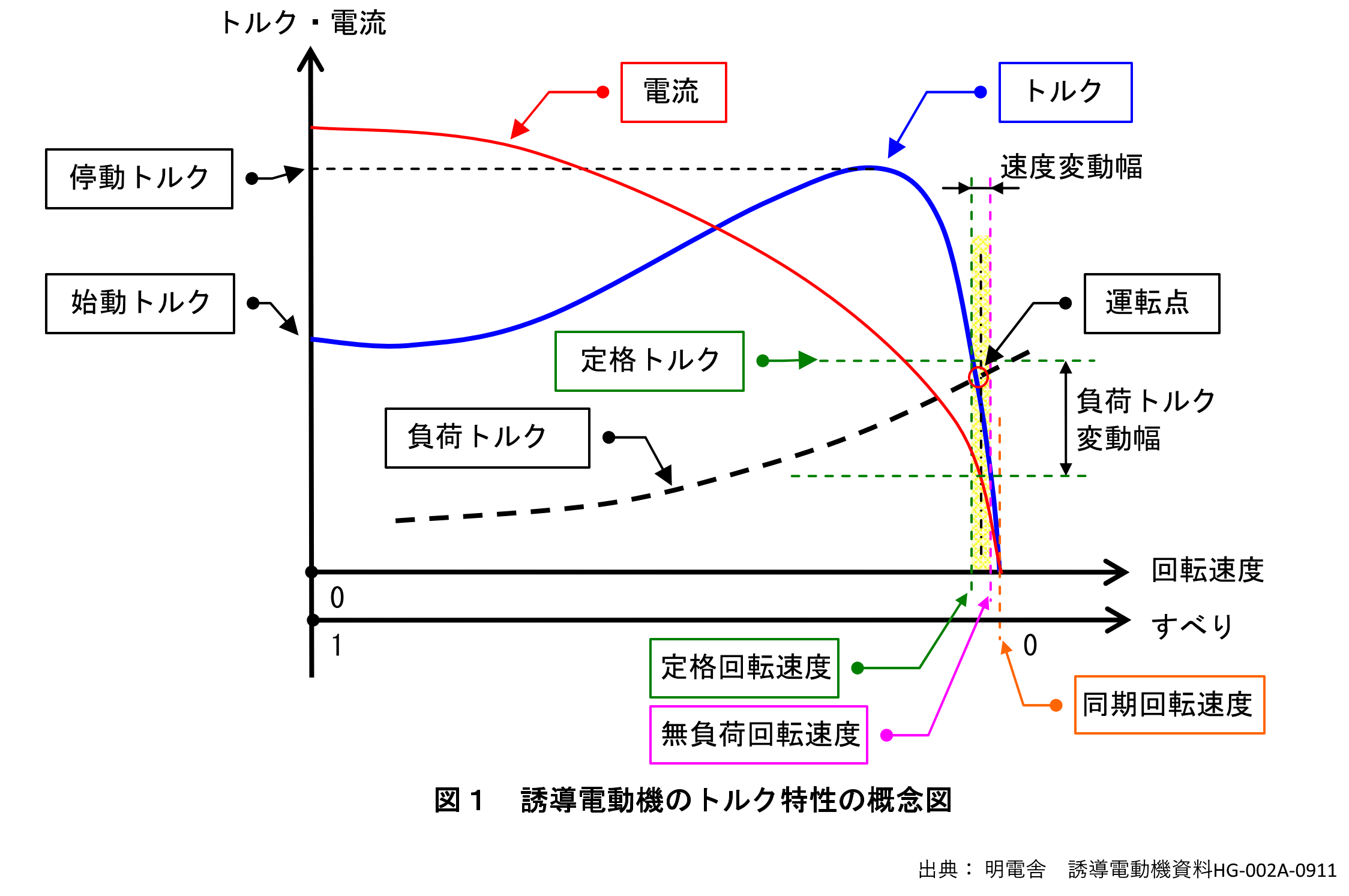
図3 誘導電動機のトルク特性
7.停動トルク(最大トルク)
誘導電動機では、回転速度が増すにつれて、トルクが大きくなりますが、最大トルクに達すると急激に小さくなり、同期速度ではゼロになります。この最大トルクを停動トルクといいます。これより大きなトルクを必要とする負荷が加わると、電動機は停止します。
8.効率
誘導電動機に投入される入力電力の一部は損失となって、音や熱に変化します。従って、実際の出力は(入力-損失)となりますので、効率は次式で表されます。
\( \eta(効率) = \displaystyle \frac{ W(入力) – \beta(損失) }{ W(入力) } \) \( \times 100 (%) \) (式6)
9.力率
交流回路では、基準を電圧として基準電圧に対して電流がどれだけ位相差があるかを考えなければなりません。電動機の場合、原則遅れ電流になるので基準電圧の位相を0度とすると遅相電流が何度になるかを\( \cos \theta \)で示します。大容量のものほどまた、極数が小さいものほど力率の値は良くなります。
10.三相誘導電動機の入出力
\( W(入力;W) = \sqrt{3} \times E(電流;V) \times I(電流;A) \times \cos \theta(力率;-) (W ) \) (式7)
\( P(出力;W) = \sqrt{3} \times E(電流;V) \times I(電流;A) \times \eta(効率;-) \times \cos \theta(力率;-) (W ) \) (式8)
スポンサーリンク
職種別 履歴書・職務経歴書サンプル(提供:JAC Recruitment)
参考文献
現場の電動機技術(新電気シリーズ) 野口昌介 オーム社 1976年
明電舎 誘導電動機資料 資料No.:HG-002A-0911 改定;2009/12/1
引用図表
図1 電動機の原理 ORG
図2 アラゴの円板 ORG
図3 誘導電動機のトルク特性 明電舎 誘導電動機資料
ORG:2020/12/01